MotionCam 3D
Parameters
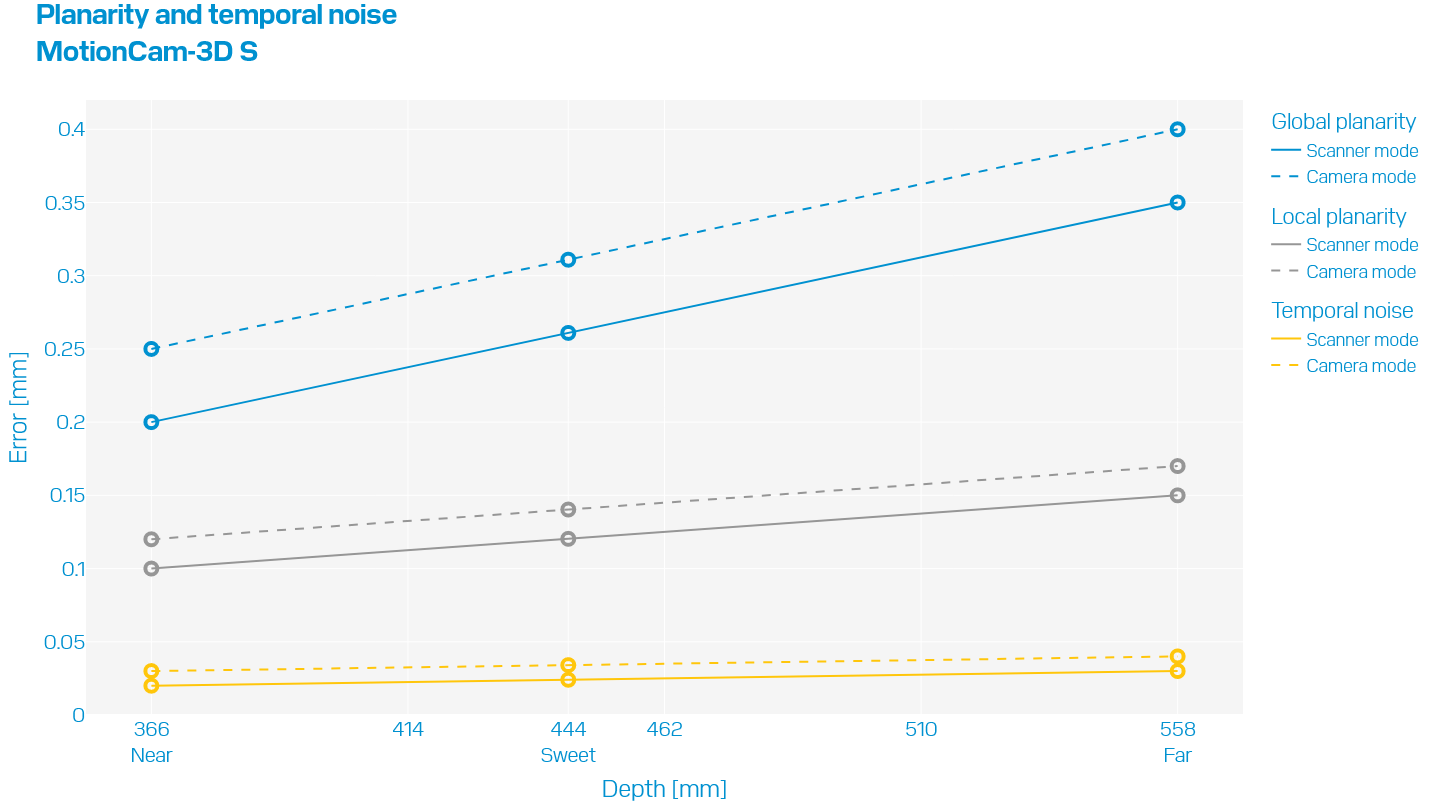
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
366 - 444 - 558 mm |
|||||||
424 x 312 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
366 |
444 |
558 |
366 |
444 |
558 |
||
1.70 |
1.70 |
1.70 |
1.95 |
1.95 |
1.95 |
||
0.20 |
0.26 |
0.35 |
0.25 |
0.31 |
0.40 |
||
0.10 |
0.12 |
0.15 |
0.12 |
0.14 |
0.17 |
||
0.02 |
0.02 |
0.03 |
0.03 |
0.03 |
0.04 |
||
2 Mpix |
0.21 |
0.25 |
0.32 |
0.21 |
0.25 |
0.32 |
|
0.9 Mpix |
0.31 |
0.38 |
0.48 |
||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
Version A: 308 x 68 x 86 mm Version B: 308 x 68 x 90 mm |
|||||||
230.0 mm |
|||||||
Version A: 1000 g Version B: 1300 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
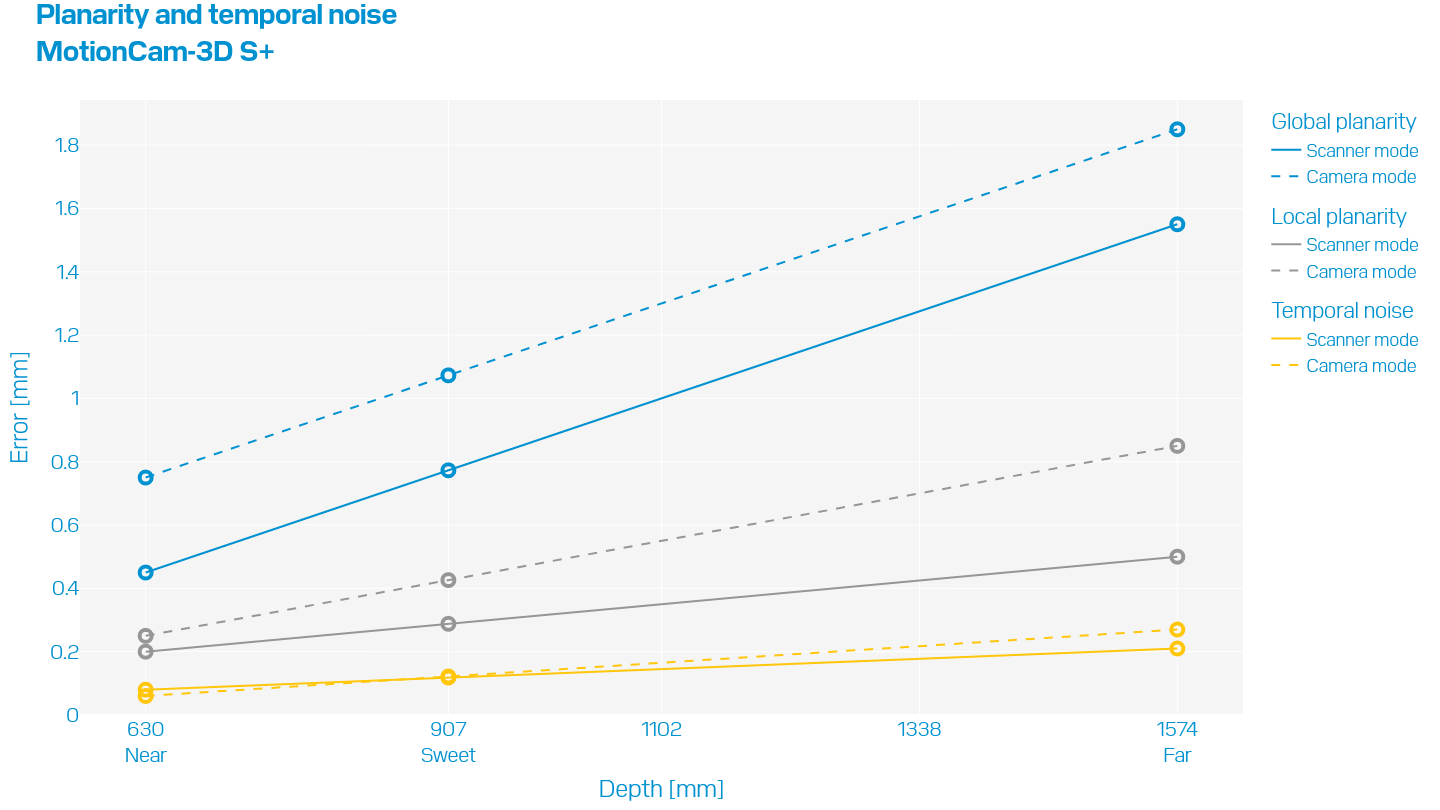
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
630 - 907 - 1574 mm |
|||||||
828 x 610 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
630 |
907 |
1574 |
630 |
907 |
1574 |
||
2.00 |
2.00 |
2.00 |
2.75 |
2.75 |
2.75 |
||
0.45 |
0.77 |
1.55 |
0.75 |
1.07 |
1.85 |
||
0.20 |
0.29 |
0.50 |
0.25 |
0.43 |
0.85 |
||
0.08 |
0.12 |
0.21 |
0.06 |
0.12 |
0.27 |
||
2 Mpix |
0.36 |
0.52 |
0.91 |
0.36 |
0.52 |
0.91 |
|
0.9 Mpix |
0.54 |
0.78 |
1.36 |
||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
Version A: 308 x 68 x 86 mm Version B: 306 x 68 x 90 mm |
|||||||
230.0 mm |
|||||||
Version A: 1000 g Version B: 1300 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
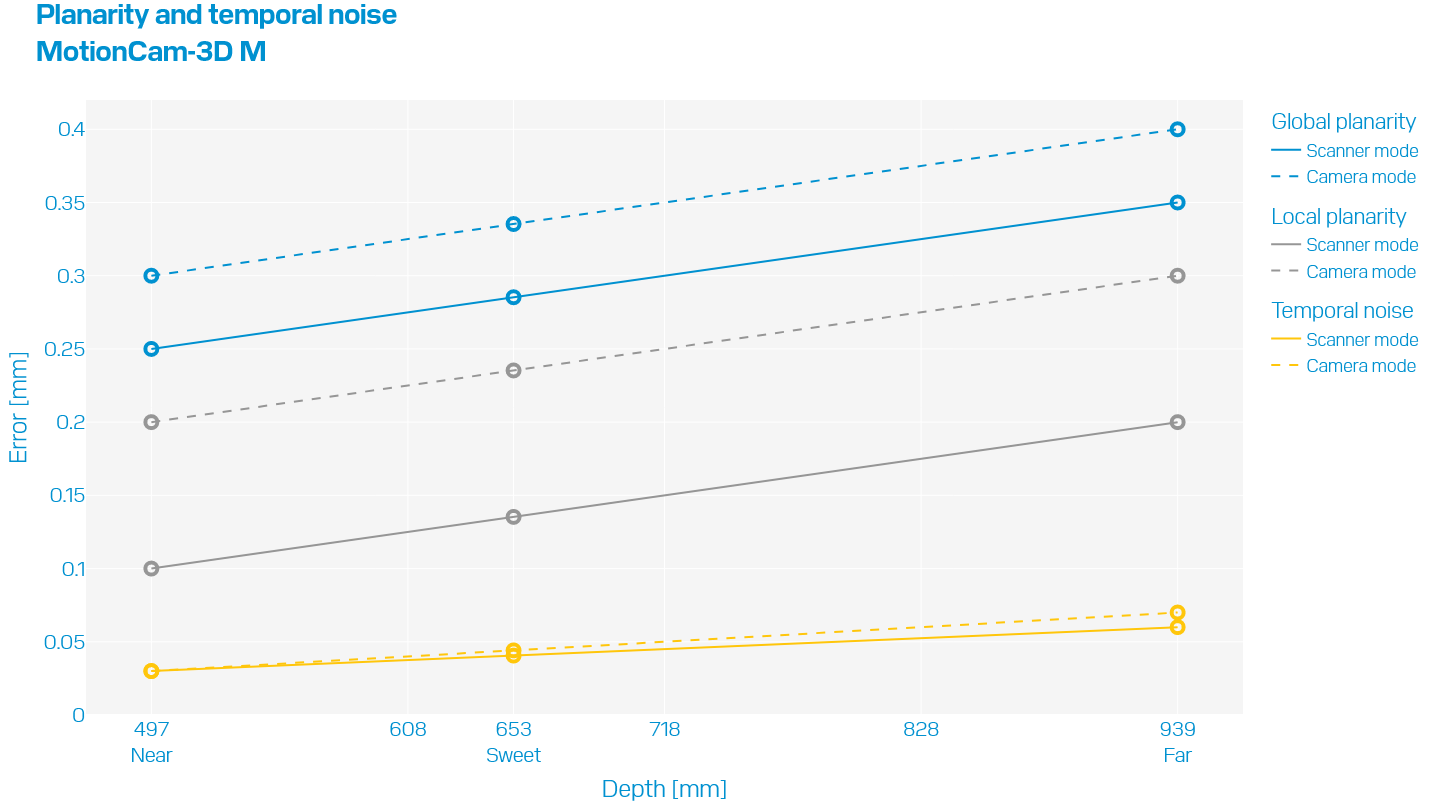
Parallel Structured Light, Structured Light |
||||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
||||||||
497 - 653 - 939 mm |
||||||||
588 x 444 mm |
||||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
|||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
|||
497 |
653 |
939 |
497 |
653 |
939 |
|||
1.35 |
1.35 |
1.35 |
1.60 |
1.60 |
1.60 |
|||
0.25 |
0.29 |
0.35 |
0.30 |
0.34 |
0.40 |
|||
0.10 |
0.14 |
0.20 |
0.20 |
0.24 |
0.30 |
|||
0.03 |
0.04 |
0.05 |
0.03 |
0.04 |
0.07 |
|||
2 Mpix |
0.28 |
0.37 |
0.54 |
0.28 |
0.37 |
0.54 |
||
0.9 Mpix |
0.43 |
0.56 |
0.81 |
|||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
|||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
|||||||
From 10 ms |
||||||||
From 60 ms |
||||||||
Version A: 428 x 68 x 86 mm Version B: 426 x 68 x 90 mm |
||||||||
350.0 mm |
||||||||
Version A: 1050 g Version B: 1400 g |
||||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
||||||||
PoE or 24V |
||||||||
1 Gbit Ethernet |
||||||||
NVIDIA Jetson TX2 |
||||||||
IP65 |
||||||||
Parallel Structured Light, Structured Light |
||||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
||||||||
630 - 907 - 1574 mm |
||||||||
841 x 610 mm |
||||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
|||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
|||
630 |
907 |
1574 |
630 |
907 |
1574 |
|||
1.75 |
1.75 |
1.75 |
2.50 |
2.50 |
2.50 |
|||
0.30 |
0.45 |
0.80 |
0.35 |
0.54 |
1.00 |
|||
0.15 |
0.21 |
0.35 |
0.20 |
0.32 |
0.60 |
|||
0.05 |
0.08 |
0.16 |
0.04 |
0.09 |
0.21 |
|||
2 Mpix |
0.36 |
0.52 |
0.91 |
0.36 |
0.52 |
0.91 |
||
0.9 Mpix |
0.54 |
0.78 |
1.36 |
|||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
|||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
|||||||
From 10 ms |
||||||||
From 60 ms |
||||||||
Version A: 428 x 68 x 86 mm Version B: 426 x 68 x 90 mm |
||||||||
350.0 mm |
||||||||
Version A: 1050 g Version B: 1400 g |
||||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
||||||||
PoE or 24V |
||||||||
1 Gbit Ethernet |
||||||||
NVIDIA Jetson TX2 |
||||||||
IP65 |
||||||||
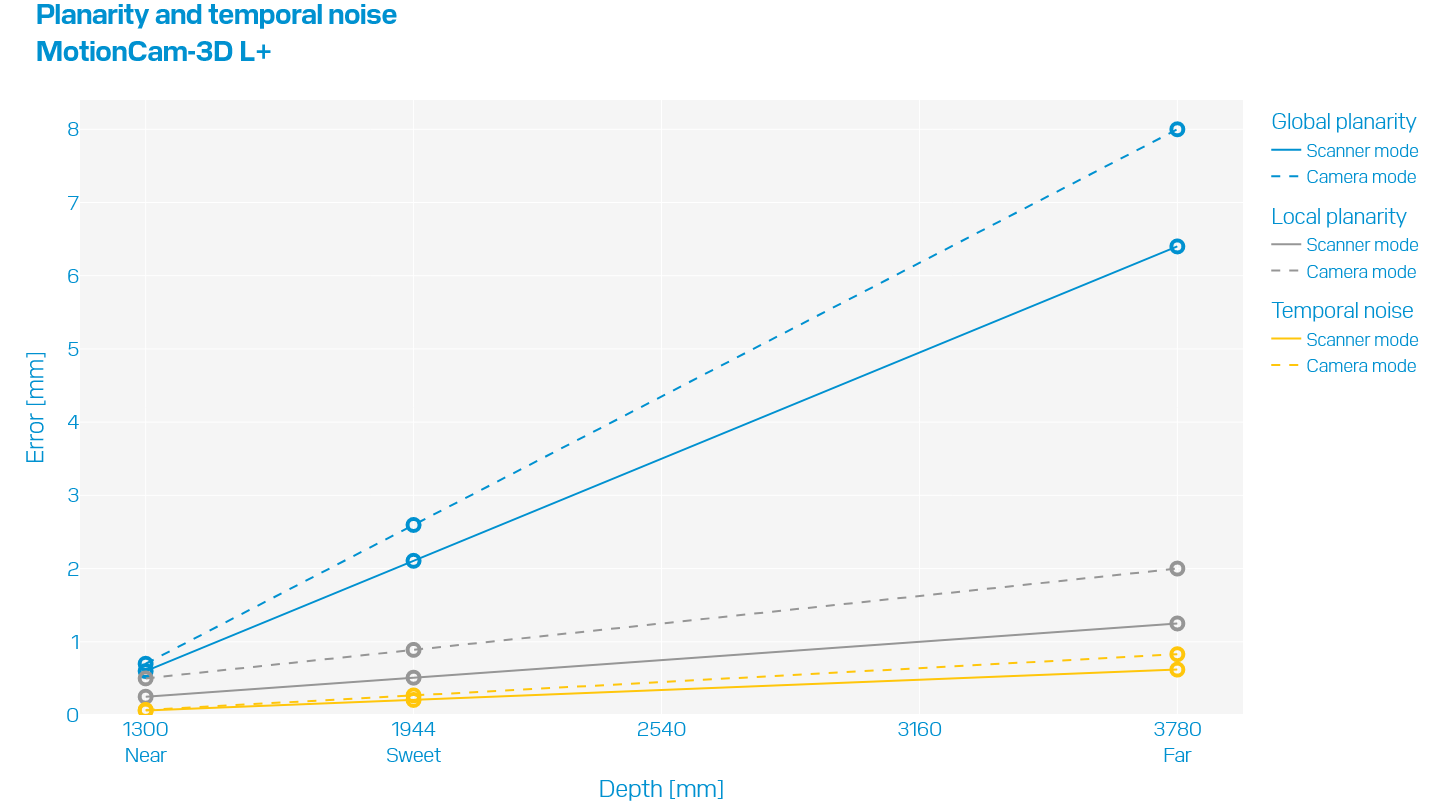
Parallel Structured Light, Structured Light |
||||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
||||||||
778 - 1252 - 3034 mm |
||||||||
1027 x 836 mm |
||||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
|||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
|||
778 |
1252 |
3034 |
778 |
1252 |
3034 |
|||
1.75 |
1.75 |
1.75 |
2.00 |
2.00 |
2.00 |
|||
0.40 |
0.87 |
2.65 |
0.45 |
1.15 |
3.80 |
|||
0.20 |
0.37 |
1.00 |
0.25 |
0.48 |
1.35 |
|||
0.07 |
0.12 |
0.32 |
0.03 |
0.12 |
0.48 |
|||
2 Mpix |
0.45 |
0.72 |
1.75 |
0.45 |
0.72 |
1.75 |
||
0.9 Mpix |
0.67 |
1.09 |
2.63 |
|||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
|||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
|||||||
From 10 ms |
||||||||
From 60 ms |
||||||||
Version A: 628 x 68 x 86 mm Version B: 626 x 68 x 90 mm |
||||||||
550.0 mm |
||||||||
Version A: 1150 g Version B: 1500 g |
||||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
||||||||
PoE or 24V |
||||||||
1 Gbit Ethernet |
||||||||
NVIDIA Jetson TX2 |
||||||||
IP65 |
||||||||
These parameters are valid at standard conditions.
Scanning Volume
Top view






Side view






Use the Photoneo 3D Sensor Selector for a quick scanning volume simulation.
Performance Graphs


Technical Drawings
Bottom View: Mounting Plate


Bottom View: Detail


Front View: Projection Unit and Camera Unit


MotionCam 3D Color (Blue/Red)
Parameters
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
366 - 444 - 558 mm |
|||||||
424 x 327 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
366 |
444 |
558 |
366 |
444 |
558 |
||
1.70 |
1.70 |
1.70 |
1.95 |
1.95 |
1.95 |
||
0.20 |
0.26 |
0.35 |
0.25 |
0.31 |
0.40 |
||
0.10 |
0.12 |
0.15 |
0.12 |
0.14 |
0.17 |
||
0.02 |
0.02 |
0.03 |
0.03 |
0.03 |
0.04 |
||
2 Mpix |
0.21 |
0.25 |
0.32 |
0.21 |
0.25 |
0.32 |
|
0.9 Mpix |
0.31 |
0.38 |
0.48 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
319 x 68 x 85 mm |
|||||||
230.0 mm |
|||||||
1000 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Blue |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
||||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
||||||||
366 - 444 - 558 mm |
||||||||
424 x 312 mm |
||||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
|||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
|||
366 |
444 |
558 |
366 |
444 |
558 |
|||
1.70 |
1.70 |
1.70 |
1.95 |
1.95 |
1.95 |
|||
0.20 |
0.26 |
0.35 |
0.25 |
0.31 |
0.40 |
|||
0.10 |
0.12 |
0.15 |
0.12 |
0.14 |
0.17 |
|||
0.02 |
0.02 |
0.03 |
0.03 |
0.03 |
0.04 |
|||
2 Mpix |
0.21 |
0.25 |
0.32 |
0.21 |
0.25 |
0.32 |
||
0.9 Mpix |
0.31 |
0.38 |
0.48 |
|||||
Up to 8 Mpix |
Up to 8 Mpix |
|||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
|||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
|||||||
From 10 ms |
||||||||
From 60 ms |
||||||||
319 x 68 x 85 mm |
||||||||
230.0 mm |
||||||||
1000 g |
||||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
||||||||
Red |
||||||||
PoE or 24V |
||||||||
1 Gbit Ethernet |
||||||||
NVIDIA Jetson TX2 |
||||||||
IP65 |
||||||||
Parallel Structured Light, Structured Light |
||||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
||||||||
630 - 907 - 1574 mm |
||||||||
828 x 649 mm |
||||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
|||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
|||
630 |
907 |
1574 |
630 |
907 |
1574 |
|||
2.00 |
2.00 |
2.00 |
2.75 |
2.75 |
2.75 |
|||
0.45 |
0.77 |
1.55 |
0.75 |
1.07 |
1.85 |
|||
0.20 |
0.29 |
0.50 |
0.25 |
0.43 |
0.85 |
|||
0.08 |
0.12 |
0.21 |
0.06 |
0.12 |
0.27 |
|||
2 Mpix |
0.36 |
0.52 |
0.91 |
0.36 |
0.52 |
0.91 |
||
0.9 Mpix |
0.54 |
0.78 |
1.36 |
|||||
Up to 8 Mpix |
Up to 8 Mpix |
|||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
|||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
|||||||
From 10 ms |
||||||||
From 60 ms |
||||||||
319 x 68 x 85 mm |
||||||||
230.0 mm |
||||||||
1000 g |
||||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
||||||||
Blue |
||||||||
PoE or 24V |
||||||||
1 Gbit Ethernet |
||||||||
NVIDIA Jetson TX2 |
||||||||
IP65 |
||||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
630 - 907 - 1574 mm |
|||||||
828 x 610 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
630 |
907 |
1574 |
630 |
907 |
1574 |
||
2.00 |
2.00 |
2.00 |
2.75 |
2.75 |
2.75 |
||
0.45 |
0.77 |
1.55 |
0.75 |
1.07 |
1.85 |
||
0.20 |
0.29 |
0.50 |
0.25 |
0.43 |
0.85 |
||
0.08 |
0.12 |
0.21 |
0.06 |
0.12 |
0.27 |
||
2 Mpix |
0.36 |
0.52 |
0.91 |
0.36 |
0.52 |
0.91 |
|
0.9 Mpix |
0.54 |
0.78 |
1.36 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
319 x 68 x 85 mm |
|||||||
230.0 mm |
|||||||
1000 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Red |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
497 - 653 - 939 mm |
|||||||
588 x 473 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
497 |
653 |
939 |
497 |
653 |
939 |
||
1.35 |
1.35 |
1.35 |
1.60 |
1.60 |
1.60 |
||
0.25 |
0.29 |
0.35 |
0.30 |
0.34 |
0.40 |
||
0.10 |
0.14 |
0.20 |
0.20 |
0.24 |
0.30 |
||
0.03 |
0.04 |
0.06 |
0.03 |
0.04 |
0.07 |
||
2 Mpix |
0.28 |
0.37 |
0.54 |
0.28 |
0.37 |
0.54 |
|
0.9 Mpix |
0.43 |
0.56 |
0.81 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
439 x 68 x 85 mm |
|||||||
350.0 mm |
|||||||
1050 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Blue |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
497 - 653 - 939 mm |
|||||||
588 x 444 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
497 |
653 |
939 |
497 |
653 |
939 |
||
1.35 |
1.35 |
1.35 |
1.60 |
1.60 |
1.60 |
||
0.25 |
0.29 |
0.35 |
0.30 |
0.34 |
0.40 |
||
0.10 |
0.14 |
0.20 |
0.20 |
0.24 |
0.30 |
||
0.03 |
0.04 |
0.06 |
0.03 |
0.04 |
0.07 |
||
2 Mpix |
0.28 |
0.37 |
0.54 |
0.28 |
0.37 |
0.54 |
|
0.9 Mpix |
0.43 |
0.56 |
0.81 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
439 x 68 x 85 mm |
|||||||
350.0 mm |
|||||||
1050 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Red |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
630 - 907 - 1574 mm |
|||||||
841 x 649 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
630 |
907 |
1574 |
630 |
907 |
1574 |
||
1.75 |
1.75 |
1.75 |
2.50 |
2.50 |
2.50 |
||
0.30 |
0.45 |
0.80 |
0.35 |
0.54 |
1.00 |
||
0.15 |
0.21 |
0.35 |
0.20 |
0.32 |
0.60 |
||
0.05 |
0.08 |
0.16 |
0.04 |
0.09 |
0.21 |
||
2 Mpix |
0.36 |
0.52 |
0.91 |
0.36 |
0.52 |
0.91 |
|
0.9 Mpix |
0.54 |
0.78 |
1.36 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
439 x 68 x 85 mm |
|||||||
350.0 mm |
|||||||
1050 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Blue |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
630 - 907 - 1574 mm |
|||||||
841 x 610 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
630 |
907 |
1574 |
630 |
907 |
1574 |
||
1.75 |
1.75 |
1.75 |
2.50 |
2.50 |
2.50 |
||
0.30 |
0.45 |
0.80 |
0.35 |
0.54 |
1.00 |
||
0.15 |
0.21 |
0.35 |
0.20 |
0.32 |
0.60 |
||
0.05 |
0.08 |
0.16 |
0.04 |
0.09 |
0.21 |
||
2 Mpix |
0.36 |
0.52 |
0.91 |
0.36 |
0.52 |
0.91 |
|
0.9 Mpix |
0.54 |
0.78 |
1.36 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
439 x 68 x 85 mm |
|||||||
350.0 mm |
|||||||
1050 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Red |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
778 - 1252 - 3034 mm |
|||||||
1027 x 889 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
778 |
1252 |
3034 |
778 |
1252 |
3034 |
||
1.75 |
1.75 |
1.75 |
2.00 |
2.00 |
2.00 |
||
0.40 |
0.87 |
2.65 |
0.45 |
1.15 |
3.80 |
||
0.20 |
0.37 |
1.00 |
0.25 |
0.48 |
1.35 |
||
0.07 |
0.12 |
0.32 |
0.03 |
0.12 |
0.48 |
||
2 Mpix |
0.45 |
0.72 |
1.75 |
0.45 |
0.72 |
1.75 |
|
0.9 Mpix |
0.67 |
1.09 |
2.63 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
639 x 68 x 85 mm |
|||||||
550.0 mm |
|||||||
1150 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Blue |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
778 - 1252 - 3034 mm |
|||||||
1027 x 836 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
778 |
1252 |
3034 |
778 |
1252 |
3034 |
||
1.75 |
1.75 |
1.75 |
2.00 |
2.00 |
2.00 |
||
0.40 |
0.87 |
2.65 |
0.45 |
1.15 |
3.80 |
||
0.20 |
0.37 |
1.00 |
0.25 |
0.48 |
1.35 |
||
0.07 |
0.12 |
0.32 |
0.03 |
0.12 |
0.48 |
||
2 Mpix |
0.45 |
0.72 |
1.75 |
0.45 |
0.72 |
1.75 |
|
0.9 Mpix |
0.67 |
1.09 |
2.63 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
639 x 68 x 85 mm |
|||||||
550.0 mm |
|||||||
1150 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Red |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
1300 - 1944 - 3780 mm |
|||||||
1656 x 1371 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
1300 |
1944 |
3780 |
1300 |
1944 |
3780 |
||
2.50 |
2.50 |
2.50 |
3.00 |
3.00 |
3.00 |
||
0.60 |
2.11 |
6.40 |
0.70 |
2.60 |
8.00 |
||
0.25 |
0.51 |
1.25 |
0.50 |
0.89 |
2.00 |
||
0.06 |
0.21 |
0.62 |
0.07 |
0.27 |
0.83 |
||
2 Mpix |
0.75 |
1.13 |
2.19 |
0.75 |
1.13 |
2.19 |
|
0.9 Mpix |
1.13 |
1.69 |
3.29 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
639 x 68 x 85 mm |
|||||||
550.0 mm |
|||||||
1150 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Blue |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Parallel Structured Light, Structured Light |
|||||||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float), Event Map (float) |
|||||||
1300 - 1944 - 3780 mm |
|||||||
1656 x 1288 mm |
|||||||
Scanner mode (Static) |
Camera mode (Dynamic) |
||||||
Near |
Sweet |
Far |
Near |
Sweet |
Far |
||
1300 |
1944 |
3780 |
1300 |
1944 |
3780 |
||
2.50 |
2.50 |
2.50 |
3.00 |
3.00 |
3.00 |
||
0.60 |
2.11 |
6.40 |
0.70 |
2.60 |
8.00 |
||
0.25 |
0.51 |
1.25 |
0.50 |
0.89 |
2.00 |
||
0.06 |
0.21 |
0.62 |
0.07 |
0.27 |
0.83 |
||
2 Mpix |
0.75 |
1.13 |
2.19 |
0.75 |
1.13 |
2.19 |
|
0.9 Mpix |
1.13 |
1.69 |
3.29 |
||||
Up to 8 Mpix |
Up to 8 Mpix |
||||||
2 Mpix (1680 x 1200) |
Up to 2 Mpix (1680 x 1200) |
||||||
Up to 2 fps (static scene) |
Up to 20 fps (dynamic scene) |
||||||
From 10 ms |
|||||||
From 60 ms |
|||||||
639 x 68 x 85 mm |
|||||||
550.0 mm |
|||||||
1150 g |
|||||||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||||||
Red |
|||||||
PoE or 24V |
|||||||
1 Gbit Ethernet |
|||||||
NVIDIA Jetson TX2 |
|||||||
IP65 |
|||||||
Scanning Volume
Top view












Bottom view












Performance Graphs







Technical Drawings
Bottom View: Mounting Plate

Bottom View: Detail

Front View: Projection Unit and Camera Unit

PhoXi 3D Scanner Gen2
Parameters
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Texture (grayscale intensity), Confidence |
|||
3.2 Mpix (2064 x 1544) |
|||
161 - 181 - 205 mm |
|||
115 x 86 mm |
|||
Near |
Sweet |
Far |
|
161 |
181 |
205 |
|
2.00 |
2.00 |
2.00 |
|
0.06 |
0.06 |
0.07 |
|
0.04 |
0.04 |
0.04 |
|
0.01 |
0.01 |
0.01 |
|
0.04 |
0.05 |
0.06 |
|
From 190 ms |
|||
From 250ms |
|||
297.2 x 68 x 86 mm |
|||
85.0 mm |
|||
900 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Texture (grayscale intensity), Confidence |
|||
3.2 Mpix (2064 x 1544) |
|||
384 - 442 - 520 mm |
|||
365 x 286 mm |
|||
Near |
Sweet |
Far |
|
384 |
442 |
520 |
|
1.25 |
1.25 |
1.25 |
|
0.20 |
0.22 |
0.25 |
|
0.15 |
0.16 |
0.18 |
|
0.03 |
0.03 |
0.04 |
|
0.16 |
0.19 |
0.22 |
|
From 190 ms |
|||
From 250ms |
|||
308 x 68 x 86 mm |
|||
230.0 mm |
|||
900 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Texture (grayscale intensity), Confidence |
|||
3.2 Mpix (2064 x 1544) |
|||
458 - 655 - 1118 mm |
|||
625 x 422 mm |
|||
Near |
Sweet |
Far |
|
458 |
655 |
1118 |
|
1.25 |
1.25 |
1.25 |
|
0.25 |
0.40 |
0.75 |
|
0.10 |
0.16 |
0.30 |
|
0.02 |
0.03 |
0.07 |
|
0.20 |
0.28 |
0.48 |
|
From 190 ms |
|||
From 250ms |
|||
428 x 68 x 86 mm |
|||
350.0 mm |
|||
950 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Texture (grayscale intensity), Confidence |
|||
3.2 Mpix (2064 x 1544) |
|||
870 - 1244 - 2150 mm |
|||
1117 x 797 mm |
|||
Near |
Sweet |
Far |
|
870 |
1244 |
2150 |
|
1.25 |
1.25 |
1.25 |
|
0.40 |
0.65 |
1.25 |
|
0.15 |
0.25 |
0.50 |
|
0.02 |
0.05 |
0.13 |
|
0.37 |
0.53 |
0.92 |
|
From 190 ms |
|||
From 250ms |
|||
628 x 68 x 86 mm |
|||
550.0 mm |
|||
1100g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Texture (grayscale intensity), Confidence |
|||
3.2 Mpix (2064 x 1544) |
|||
1680 - 2331 - 3780 mm |
|||
2019 x 1495 mm |
|||
Near |
Sweet |
Far |
|
1680 |
2331 |
3780 |
|
1.60 |
1.60 |
1.60 |
|
0.70 |
1.38 |
2.90 |
|
0.30 |
0.59 |
1.25 |
|
0.11 |
0.21 |
0.45 |
|
0.72 |
1.00 |
1.62 |
|
From 190 ms |
|||
From 250ms |
|||
953 x 68 x 86 mm |
|||
850.0 mm |
|||
1200 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Scanning Volume
Top view





Side view





Performance Graphs




Technical Drawings
Bottom View: Mounting Plate


Bottom View: Detail


Front View: Projection Unit and Camera Unit


PhoXi 3D Scanner Gen3 (Blue/Red)
Parameters
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float) |
|||
5.1 Mpix (2472 x 2064) |
|||
Up to 8 Mpix |
|||
384 - 442 - 520 mm |
|||
364 x 317 mm |
|||
Near |
Sweet |
Far |
|
384 |
442 |
520 |
|
1.25 |
1.25 |
1.25 |
|
0.20 |
0.22 |
0.25 |
|
0.15 |
0.16 |
0.18 |
|
0.03 |
0.03 |
0.04 |
|
0.13 |
0.16 |
0.18 |
|
From 190 ms |
|||
From 250 ms |
|||
319 x 68 x 86 mm |
|||
230.0 mm |
|||
900 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Blue |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float) |
|||
5.1 Mpix (2472 x 2064) |
|||
Up to 8 Mpix |
|||
384 - 442 - 520 mm |
|||
364 x 305 mm |
|||
Near |
Sweet |
Far |
|
384 |
442 |
520 |
|
1.25 |
1.25 |
1.25 |
|
0.20 |
0.22 |
0.25 |
|
0.15 |
0.16 |
0.18 |
|
0.03 |
0.03 |
0.04 |
|
0.13 |
0.16 |
0.18 |
|
From 190 ms |
|||
From 250 ms |
|||
319 x 68 x 86 mm |
|||
230.0 mm |
|||
900 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float) |
|||
5.1 Mpix (2472 x 2064) |
|||
Up to 8 Mpix |
|||
458 - 655 - 1118 mm |
|||
623 x 467 mm |
|||
Near |
Sweet |
Far |
|
458 |
655 |
1118 |
|
1.25 |
1.25 |
1.25 |
|
0.25 |
0.40 |
0.75 |
|
0.10 |
0.16 |
0.30 |
|
0.02 |
0.03 |
0.07 |
|
0.16 |
0.23 |
0.39 |
|
From 190 ms |
|||
From 250 ms |
|||
439 x 68 x 86 mm |
|||
350.0 mm |
|||
950 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Blue |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float) |
|||
5.1 Mpix (2472 x 2064) |
|||
Up to 8 Mpix |
|||
458 - 655 - 1118 mm |
|||
623 x 443 mm |
|||
Near |
Sweet |
Far |
|
458 |
655 |
1118 |
|
1.25 |
1.25 |
1.25 |
|
0.25 |
0.40 |
0.75 |
|
0.10 |
0.16 |
0.30 |
|
0.02 |
0.03 |
0.07 |
|
0.16 |
0.23 |
0.39 |
|
From 190 ms |
|||
From 250 ms |
|||
439 x 68 x 86 mm |
|||
350.0 mm |
|||
950 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float) |
|||
5.1 Mpix (2472 x 2064) |
|||
Up to 7 Mpix |
|||
870 - 1244 - 2150 mm |
|||
1112 x 883 mm |
|||
Near |
Sweet |
Far |
|
870 |
1244 |
2150 |
|
1.25 |
1.25 |
1.25 |
|
0.40 |
0.65 |
1.25 |
|
0.15 |
0.25 |
0.50 |
|
0.02 |
0.05 |
0.13 |
|
0.31 |
0.44 |
0.76 |
|
From 190 ms |
|||
From 250 ms |
|||
639 x 68 x 86 mm |
|||
550.0 mm |
|||
1100 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Blue |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float) |
|||
5.1 Mpix (2472 x 2064) |
|||
Up to 8 Mpix |
|||
870 - 1244 - 2150 mm |
|||
1112 x 822 mm |
|||
Near |
Sweet |
Far |
|
870 |
1244 |
2150 |
|
1.25 |
1.25 |
1.25 |
|
0.40 |
0.65 |
1.25 |
|
0.15 |
0.25 |
0.50 |
|
0.02 |
0.05 |
0.13 |
|
0.31 |
0.44 |
0.76 |
|
From 190 ms |
|||
From 250 ms |
|||
639 x 68 x 86 mm |
|||
550.0 mm |
|||
1100 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float) |
|||
5.1 Mpix (2472 x 2064) |
|||
Up to 8 Mpix |
|||
1680 - 2331 - 3780 mm |
|||
2008 x 1656 mm |
|||
Near |
Sweet |
Far |
|
1680 |
2331 |
3780 |
|
1.60 |
1.60 |
1.60 |
|
0.70 |
1.38 |
2.90 |
|
0.30 |
0.59 |
1.25 |
|
0.11 |
0.21 |
0.45 |
|
0.60 |
0.83 |
1.34 |
|
From 190 ms |
|||
From 250 ms |
|||
964 x 68 x 86 mm |
|||
850.0 mm |
|||
1200 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Blue |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Color Image, Texture (grayscale/RGB), Confidence (float) |
|||
5.1 Mpix (2472 x 2064) |
|||
Up to 8 Mpix |
|||
1680 - 2331 - 3780 mm |
|||
2008 x 1520 mm |
|||
Near |
Sweet |
Far |
|
1680 |
2331 |
3780 |
|
1.60 |
1.60 |
1.60 |
|
0.70 |
1.38 |
2.90 |
|
0.30 |
0.59 |
1.25 |
|
0.11 |
0.21 |
0.45 |
|
0.60 |
0.83 |
1.34 |
|
From 190 ms |
|||
From 250 ms |
|||
964 x 68 x 86 mm |
|||
850.0 mm |
|||
1200 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
Red |
|||
PoE or 24V |
|||
NVIDIA Jetson TX2 |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Scanning Volume
Top view








Side view






Performance Graphs






Technical Drawings
Bottom View: Mounting Plate

Bottom View: Detail

Front View: Projection Unit and Camera Unit

Alpha 3D Scanner
Parameters
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Texture (grayscale intensity), Confidence |
|||
1.5Mpix (1440 x 1080) |
|||
870 - 1239 - 2150 mm |
|||
1091 x 761 mm |
|||
Near |
Sweet |
Far |
|
870 |
1239 |
2150 |
|
2.00 |
2.00 |
2.00 |
|
0.70 |
0.96 |
1.60 |
|
0.30 |
0.50 |
1.00 |
|
0.08 |
0.17 |
0.38 |
|
0.55 |
0.79 |
1.37 |
|
From 240 ms |
|||
From 450 ms |
|||
439 x 68 x 86 mm |
|||
350.0 mm |
|||
950 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
PoE or 24V |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Structured Light |
|||
3D points (x y z), Normals (x y z), Depth Map (z), Texture (grayscale intensity), Confidence |
|||
1.5 Mpix (1440 x 1080) |
|||
1680 - 2326 - 3780 mm |
|||
1736 x 1421 mm |
|||
Near |
Sweet |
Far |
|
1680 |
2326 |
3780 |
|
2.70 |
2.70 |
2.70 |
|
1.40 |
3.05 |
6.75 |
|
0.50 |
0.81 |
1.50 |
|
0.16 |
0.40 |
0.95 |
|
1.07 |
1.48 |
2.41 |
|
From 240 ms |
|||
From 450 ms |
|||
439 x 68 x 86 mm |
|||
350.0 mm |
|||
950 g |
|||
Full: 0 - 40 °C (32 - 104 °F) Optimal: 22 - 25 °C (71.6 - 77 °F) |
|||
PoE or 24V |
|||
1 Gbit Ethernet |
|||
IP65 |
|||
Scanning Volume
Top view


Side view


Performance Graphs


Technical Drawings
Bottom View: Mounting Plate

Bottom View: Detail

Front View: Projection Unit and Camera Unit

Parameter Definitions
The datasheet defines several performance properties of a Photoneo 3D Sensor. A population of production devices is characterized by the typical and maximum observed values, given a properly maintained device. The typical value represents the performance of the average device, while the maximum value is the upper limit of the population. Some of the performance properties were determined theoretically from a model.
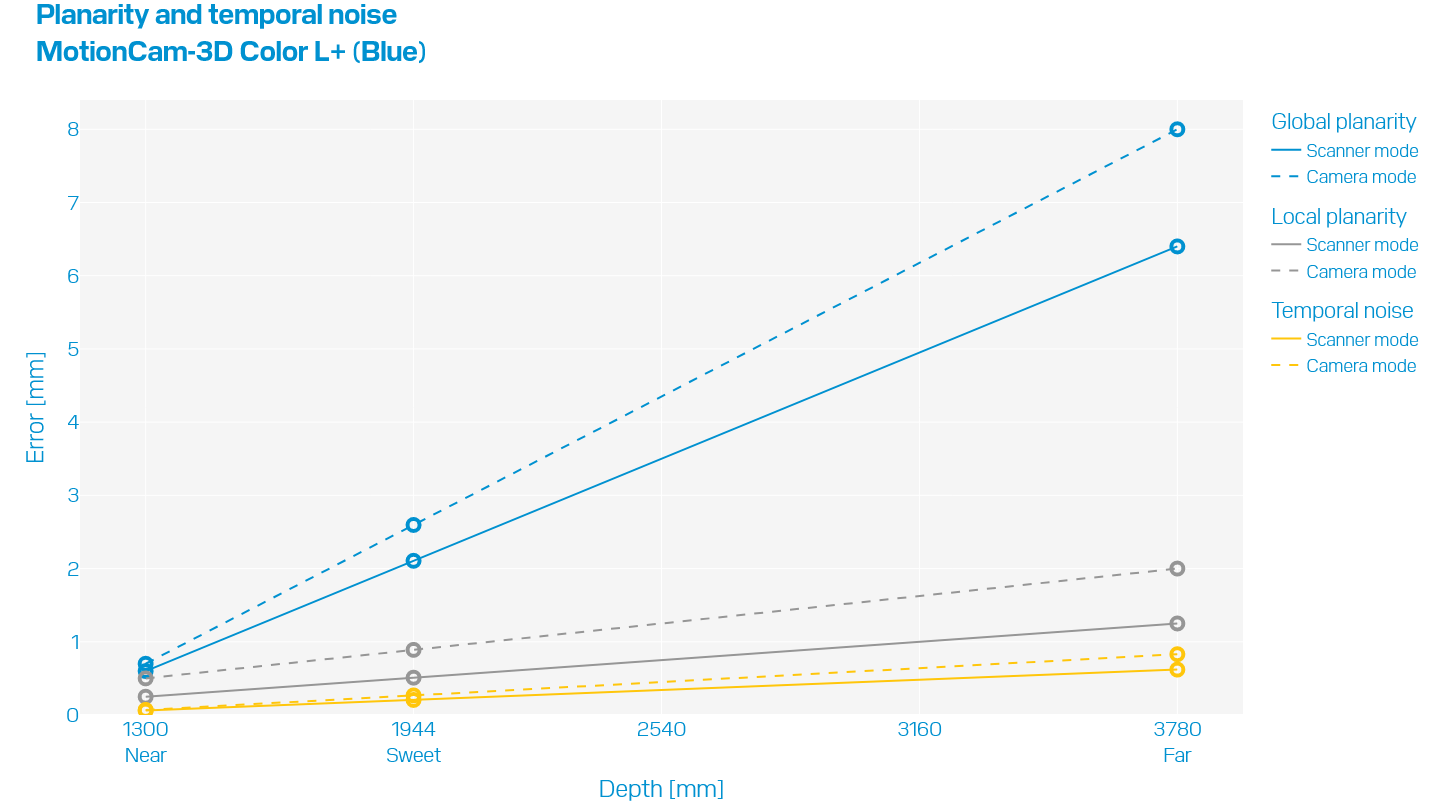
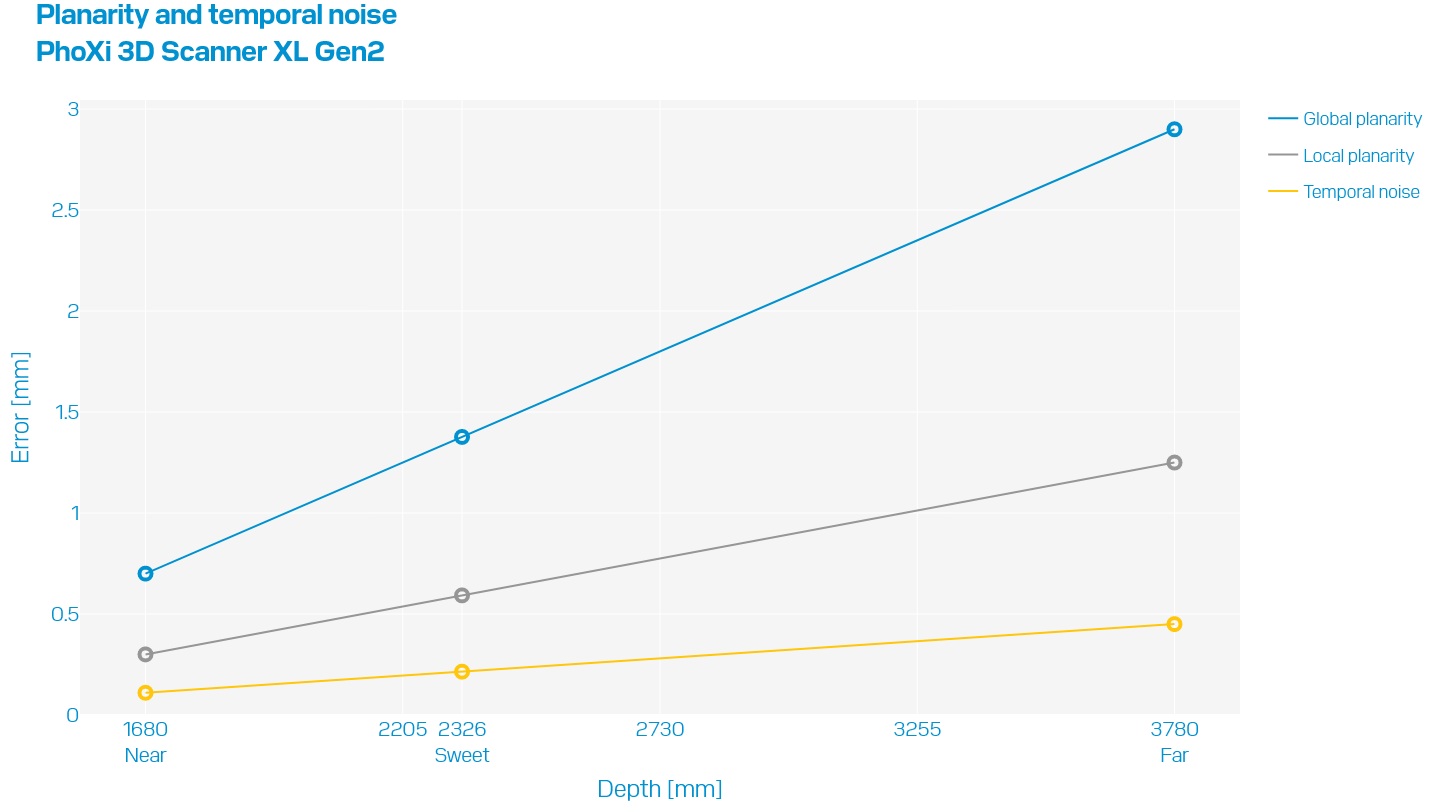
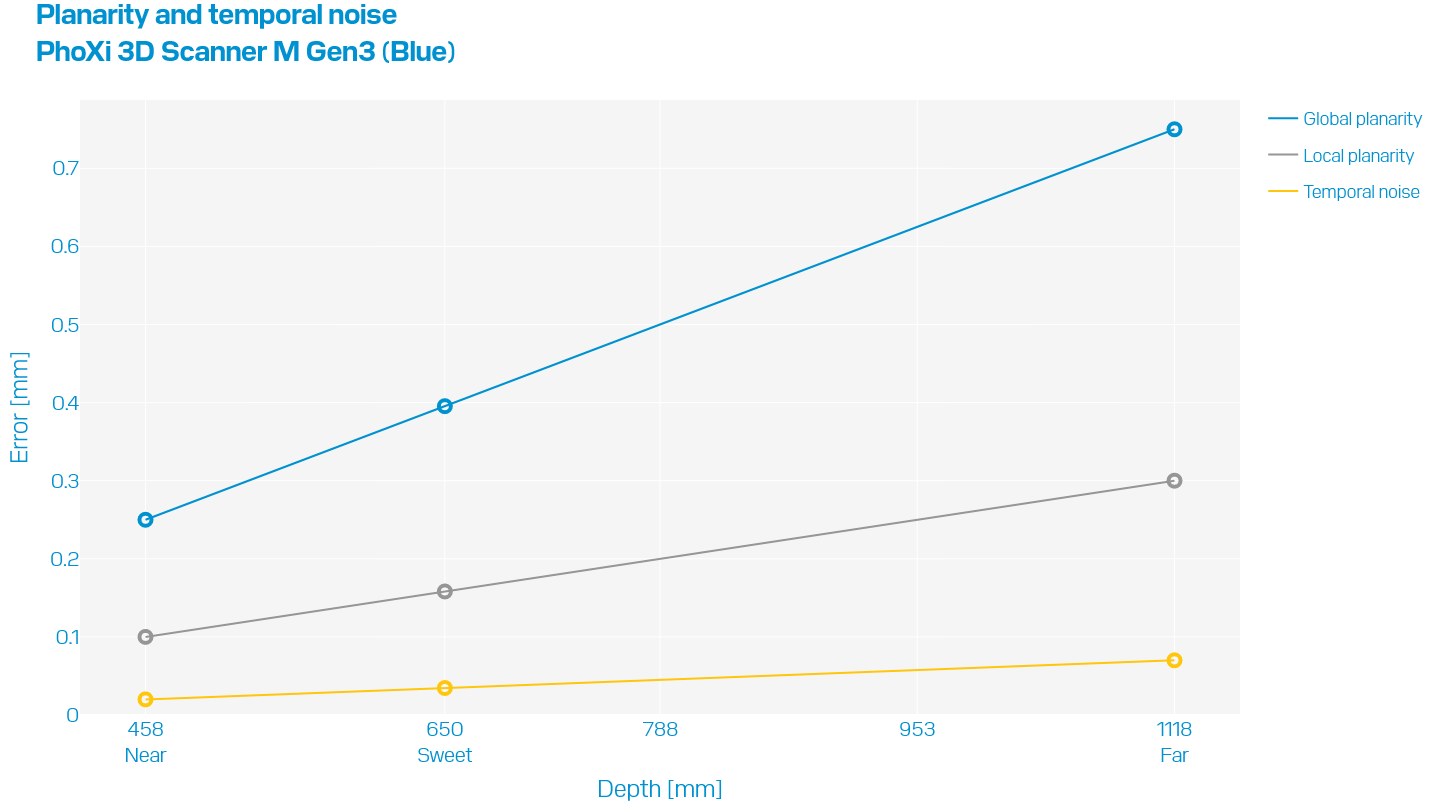
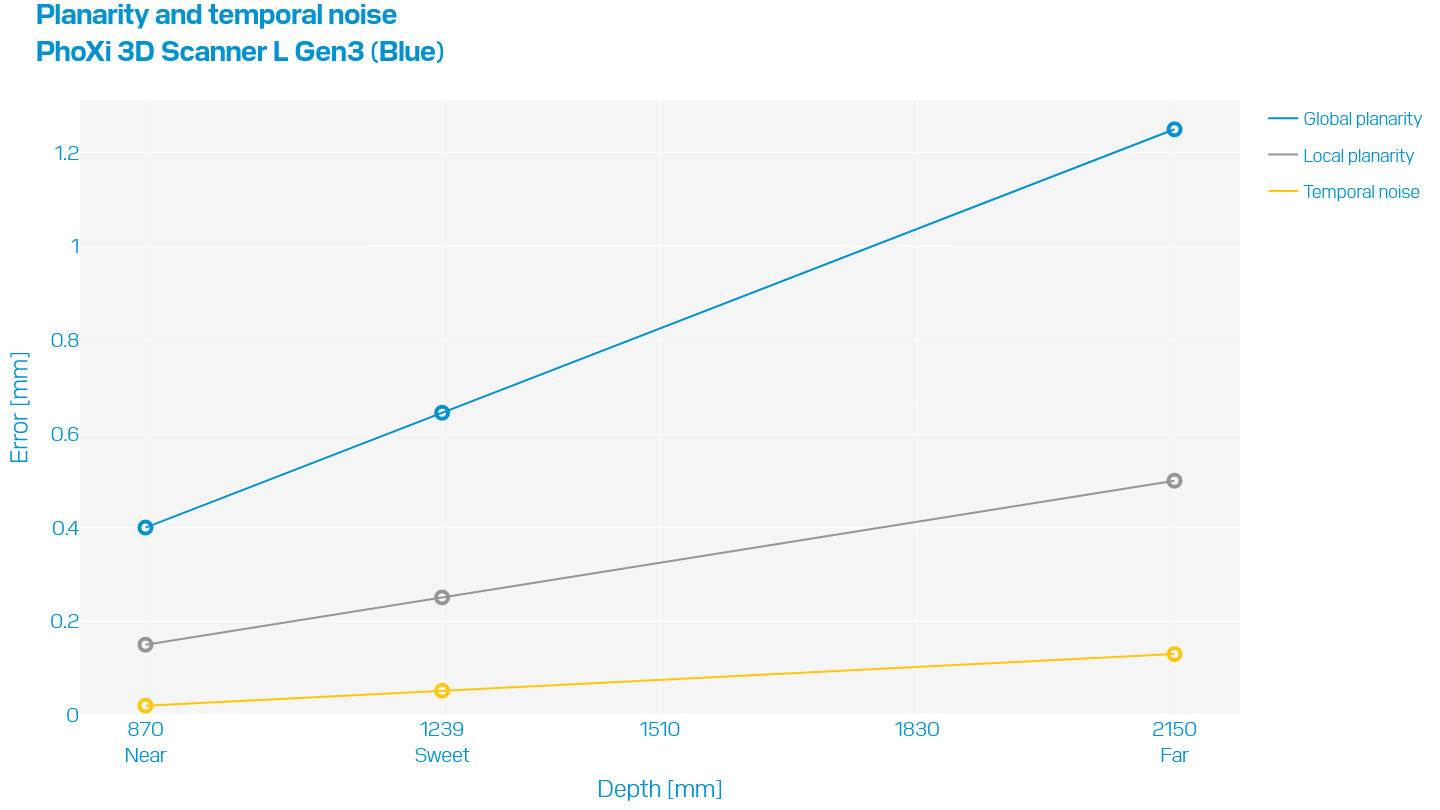
The table values represented in the datasheet are the maximum values. The graphs show both maximum and typical values.
Standard Conditions
The Standard Conditions refer to a stable environment for measurements, characterized by homogenous ambient light, excluding strong or flashing light sources other than the verified device, a stable humidity and stable room temperature (ISO 554), and the absence of shocks or shaking.
3D Sensing Technology
Photoneo 3D Sensor either uses sequential structured light technology or Parallel Structured Light Technology. More information can be found in the section Objects Suitable for Scanning of the Photoneo 3D Sensors - User Manual.
Output Data
Depending on the device used for scanning, the output data structure can differ.
3D points (x y z)
Floating numbers depicting the position of a 3D point in a given coordinate frame. The default coordinate frame has its origin in the 2D camera with the Z-axis towards the scene, the X-axis continuing to the right of the device, and the Y-axis facing downward.
Normals (x y z)
The normal vector for each 3D point can also be calculated. The normal vector is perpendicular to the area surrounding the point.
Depth Map (z)
The “depth” of a point is the absolute 3D distance from the image sensor to the measured point (the ray of light that hits the surface of the object). The DepthMap is, therefore, always in the camera coordinate system and corresponds to the Z coordinate value in the point cloud.
Color Image (RGB)
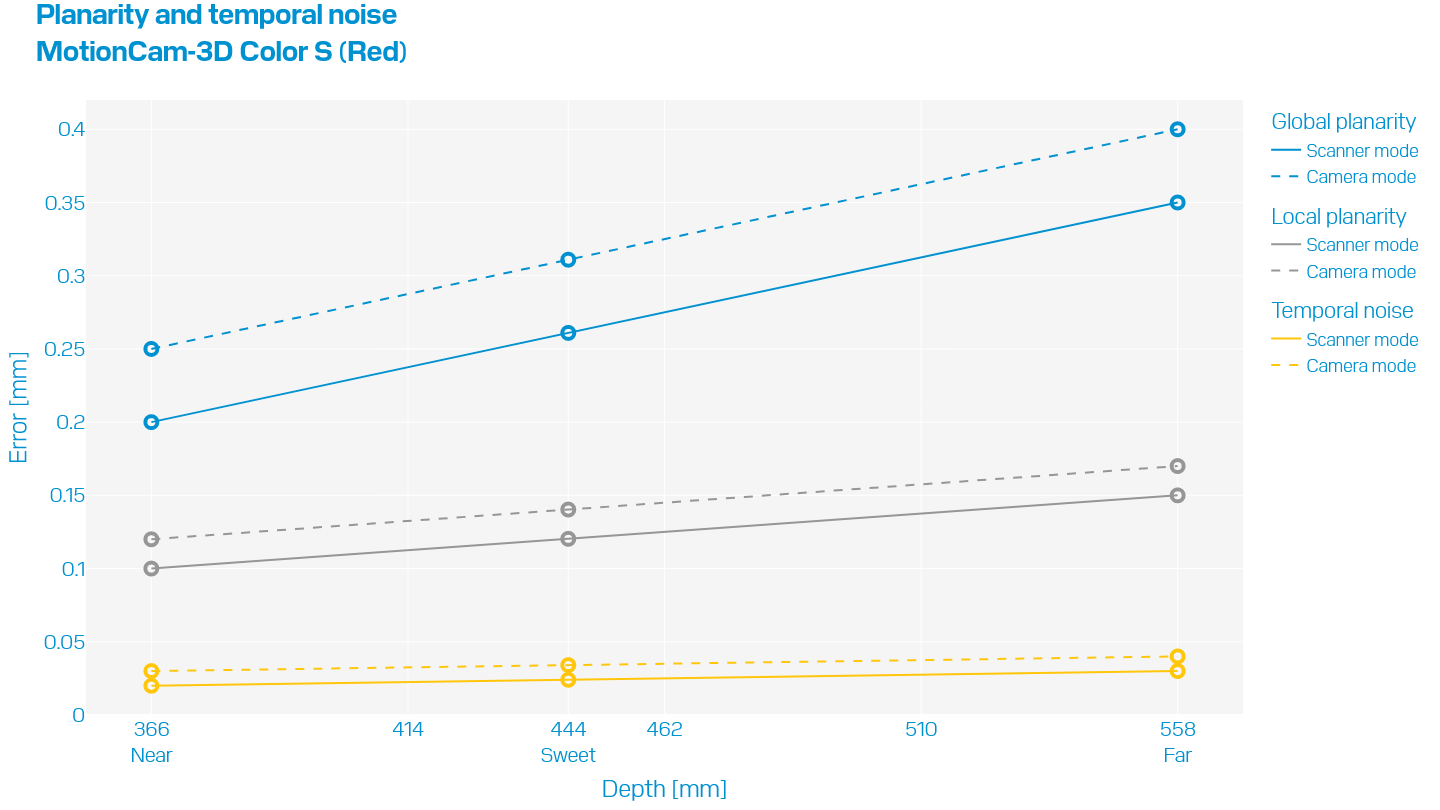
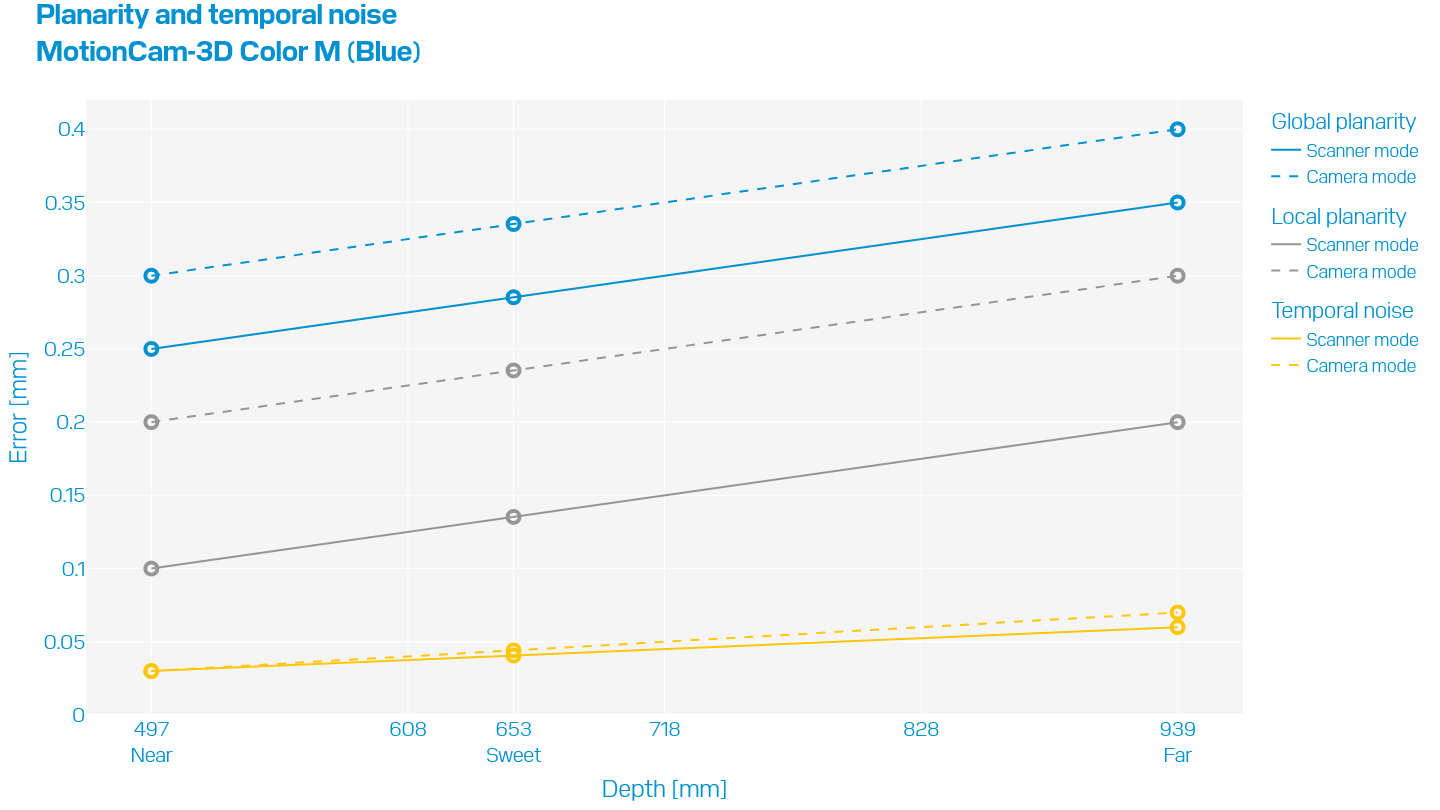
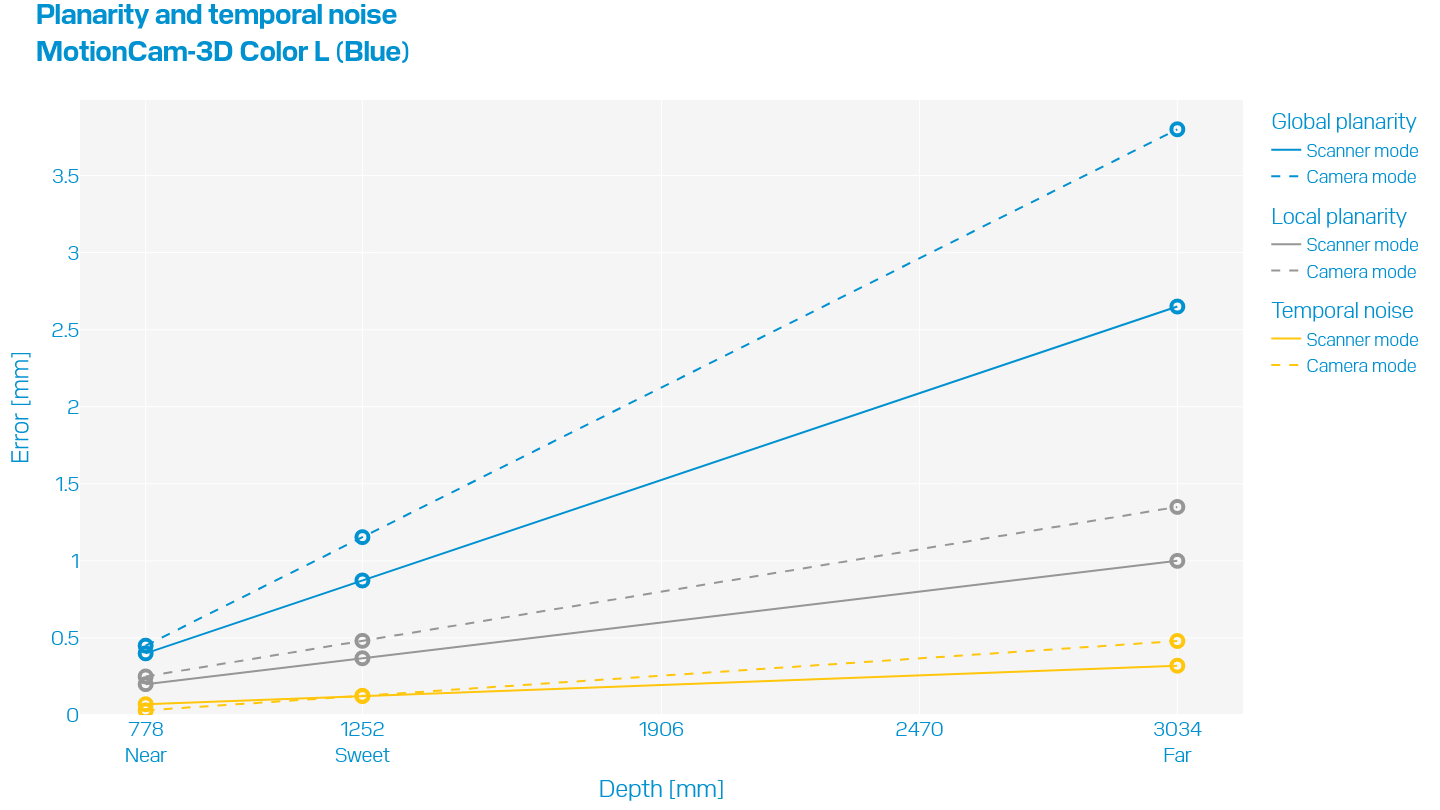
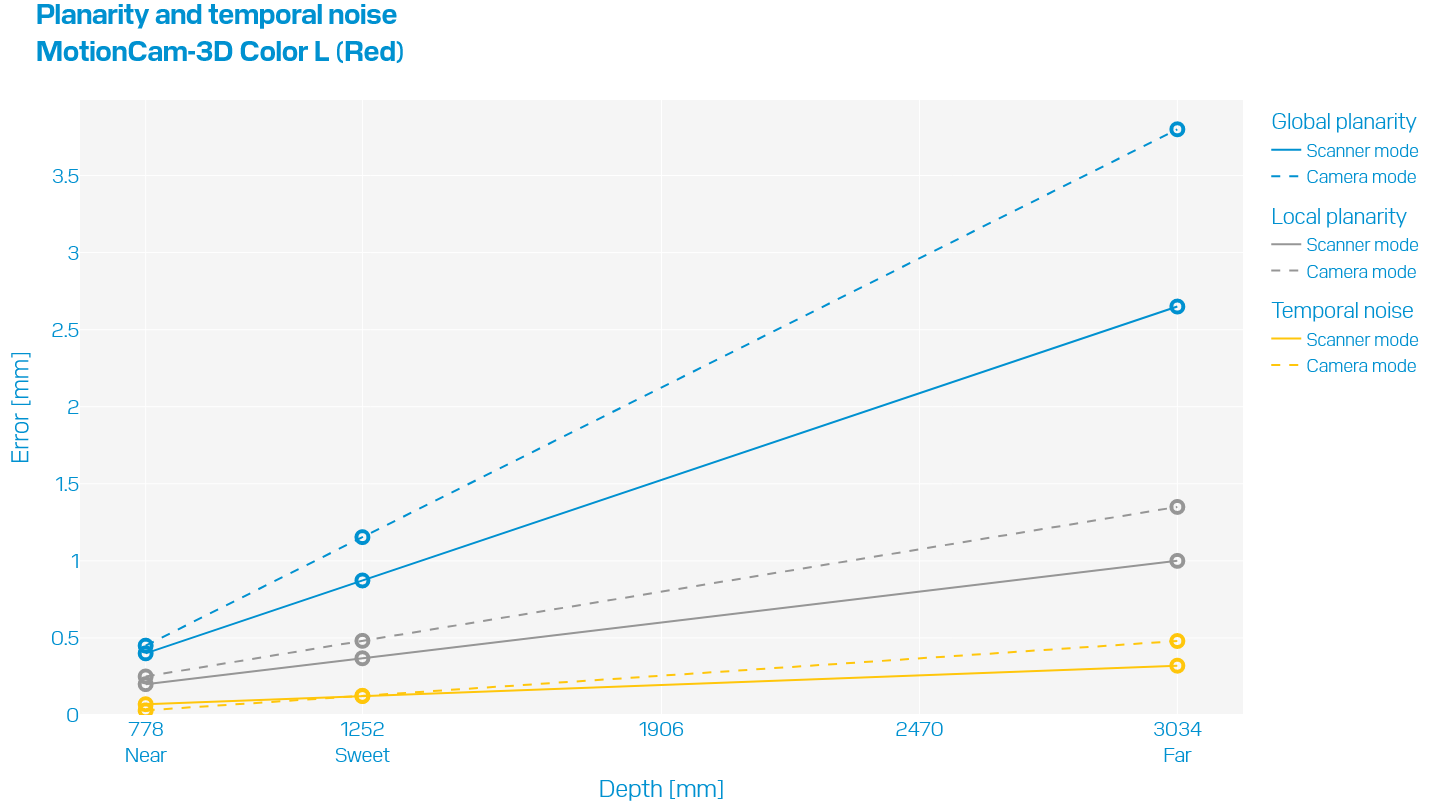
A 2D RGB texture is available on the MotionCam-3D Color in both Scanner and Camera modes at different resolutions.
Texture (grayscale/RGB)
A 2D texture (LED, Computed, Laser, Focus, Color).
Confidence (float)
For each measured 3D point, the “confidence” value expresses certainty about the accuracy of the point measurements. For example, a confidence value of 0.12 means that the estimated error for a point measurement is 0.12 mm. This value is based on a heuristic method that considers the light conditions for each pixel.
Scanning Distance
The Scanning Distance is the distance between the sensor and the verification object. It can be expressed in millimeters or simplified into terms such as near, sweet, or far to describe the minimal, ideal or maximal distance of the scanned object from the device.
Scanning Range (near - far)
The Scanning Range consists of 2 values, which represent the minimal (near) and maximal (far) distance of the scanned object from the device in order to perform the 3D reconstruction. The volume bounded by intersecting planes at near/far distances is called a calibration volume, and it is determined by the model of the Photoneo 3D Sensor.
Optimal Scanning Distance (sweet spot)
Denotes the focus distance of the primary 2D camera (inside a Photoneo 3D Sensor) at which, theoretically, the best scanning results can be obtained.
Scanning Area (sweet spot)
Size of the area that is covered by the field of view at the optimal scanning distance (sweet spot).
Operation Mode / Scene (MotionCam-3D devices only)
MotionCam-3D (Color) devices are able to switch between a Camera (Dynamic) mode and a Scanner (Static) mode. In the Camera mode, the device is able to capture objects in motion, or the device itself can be moving without causing any motion blur. The Scanner mode requires the devices as well as the scene to be static during scanning. Additionally, all devices also support a 2D mode that outputs only 2D texture data.
Relative Distance Accuracy
The Relative Distance Accuracy expresses the accuracy of the measured distance between 2 points in a scene, divided by their true/reference distance. Distances are measured for points lying at a particular depth from the device. The provided value is the 68th percentile of measured relative errors.
The performance parameters are valid at Standard Conditions for a maintained device using marker based Maintenance Tool. For the devices maintained only via Autonomous Maintenance the RDA value may increase by up to 0.2%. For every 10 °C deviation of the ambient temperature outside the Standard Conditions, the RDA value may increase by up to 0.15%.
Global Planarity
The Global Planarity refers to the root mean square error (i.e., standard deviation) of the plane fitted to the point cloud of the planar surface that covers the whole field of view and is parallel to the device body.
Local Planarity
The Local Planarity refers to the root mean square error (i.e., standard deviation) of the plane fitted to the local planar surface (approx. 50x50 points) parallel to the device body. An average of the individual measurements is computed over the patches covering the field of view.
Temporal Noise
The Temporal Noise represents the repeatability of the point-wise depth measurements (i.e., standard deviation) aggregated over the whole field of view in a particular depth. This property expresses the ability of the sensor to capture local surface details.
Point-to-Point Distance
The Point-to-Point Distance is the average lateral distance between the closest neighboring points in the point cloud at the specified distance from the sensor. It can also be interpreted as the average diameter of a patch associated with a single 3D point observed at a specific distance from the sensor.
Acquisition Time
The Acquisition Time is the active duration required to illuminate the scene and capture the raw data. This value may not correspond to the value displayed in the frame information.
Scanning Time
The total Scanning Time is the sum of the time required for acquisition, computation, and transfer.
Depth Map Resolution
The Depth Map Resolution defines the number of pixels of the primary 2D camera used for 3D sensing.
Color Image Resolution
The Color Image Resolution refers to the number of pixels of the secondary RGB camera. The resolution of the RGB camera can be set to one of the predefined values. Note that the Color Image Resolution is independent of the Depth Map Resolution.
Frames Per Second
The Frames Per Second (FPS) expresses the maximum achievable frame rate, i.e., the number of 3D scans per second. The FPS value can be affected by the selected profile or parameters.
Dimensions
The Dimensions are expressed in 3 values that represent the length, height, and depth of the device in millimeters, respectively.
Baseline
The Baseline is the distance between the primary 2D camera and the projection unit.
Weight
Weight of the device (without accessories).
Color Camera Angle
The angular coverage of the secondary RGB camera, defining the extent of the scene captured in a single image.
Main Camera Angle
The angular coverage of the primary 2D camera used for 3D sensing, determining the portion of the scene included in the scan.
Main Camera Field Of View
The Field of View (FOV) of the primary 2D camera, expressed in degrees, representing the horizontal and vertical span visible at a given distance.
Temperature Working Range
The Temperature Working Range refers to the operational range of temperatures of the Photoneo 3D Sensors. To achieve the optimum scanning performance, the sensor needs to be thermalized within the optimal temperature range (standard atmospheric conditions defined by ISO 554).
Projection Unit Laser Color
The Projection Unit Laser Color describes the color of the laser used in the sensor’s projection unit. The type of the projection unit can have an effect on the scanning performance on specific scenes and objects.
Power
The device can be powered using a Power over Ethernet injector or a 24V adapter. Further information can be found in photoneo.com/kb/device-manual
Processing Unit
The processing unit for Photoneo 3D Sensors is the NVIDIA Jetson TX2. This unit performs all 3D data computations directly on the device, which helps to reduce external computing demands
IP Rating
Indicates the level of protection against solid particles and liquids, as defined by IEC 60529. The first digit rates dust protection, the second rates water resistance; higher numbers mean greater protection. For more information, visit : https://www.iec.ch/ip-ratings
Data Connection
It is recommended that the device be connected to a 1 Gbit network to ensure sufficient data flow.
All rights reserved.
Copyright © 2025 by Zebra Technologies Slovakia s.r.o., Bratislava, Slovakia
Photoneo™, PhoXi™ Control, PhoXi™ 3D Scanner, MotionCam-3D are registered trademarks of Zebra Technologies Slovakia s.r.o.